This program creates a control network for a latitude/longitude range on a
specified target planet. The control network that is created is a grid
of evenly-spaced control points. The control network generated will have
no control measures, but will instead have a known latitude and longitude
for each control point. The resulting control network can then have images
added to it by using the
cnetadd
application.
Fixed error when calculating X/Y range and added application test.
Travis Addair
2009-09-11
Added parameter allowing user to enter in projection type to use in seeding process.
Travis Addair
2009-09-14
Changed means of entering projection type to be a map file so as to allow
for more customization and accepted projection types.
Travis Addair
2009-09-24
Added option to use lat/lon spacing when seeding points; fixed bug causing
points to be seeded outside the lat/lon range; added a default projection
type and reinstated the TARGET parameter so the user does not need to edit
a projection file in order to run the program.
Travis Addair
2010-06-07
Added progress bar.
Tracie Sucharski
2010-10-26
Changed for new Control Network format.
Travis Addair
2011-04-11
Changed parameters PROJECTION to MAP and TO to ONET for consistency.
Travis Addair
2011-07-08
Added error checking for latitude and longitude ranges
Jai Rideout
2011-09-30
Updated documentation with Janet Richie and Laszlo Kestay for release and
added example.
Debbie A. Cook
2012-12-10
Changed to use TProjection instead of Projection. References #775
This is the planet on which the Lat/Lon range resides. The target
can be specified in one of two ways: by typing the name of a planet
for this parameter, or by including the TargetName in the MAP file.
If the user specifies both, then the TARGET parameter will be used
instead of the TargetName in the MAP file. If neither is specified,
the program will throw an error.
A file containing the mapping parameters in PVL form. This file can
be a simple PVL file or an existing cube label that contains a
Mapping group. By default, the program will use a
standard map template for a Sinusoidal projection. If the keyword
TargetName is not in this mapping file, then the user must specify
a value for the TARGET parameter. You can produce map files using the
maptemplate program.
This option allows the user to specify the type of spacing the
program will use when generating the control points. Selecting
METER spacing will use a projection to attempt to place control
points every XSTEP meters within the longitude range, and every
YSTEP meters within the latitude range. Conversely, LATLON spacing
will simply place control points every LATSTEP and LONSTEP within
the range.
Type
string
Default
METER
Option List:
Option
Brief
Description
METER
Space control points in the range by meter increments.
This option will space control points in the range by a
specified XSTEP and YSTEP given in meters on the planet's
surface. If this option is selected, the user must also
specify a MAP file, but not necessarily a value for
TARGET if the projection contains the TargetName keyword.
Exclusions
LATSTEP
LONSTEP
Inclusions
MAP
XSTEP
YSTEP
LATLON
Space control points in the range by latitude and longitude
increments.
This option will space control points in the range by a
specified LATSTEP and LONSTEP, given in terms of the
planet's degrees latitude and longitude, respectively. If
this option is selected, the user must specify a TARGET
name, but not a MAP file. The lat/lon coordinates are in
universal format: the longitude domain is 0-360, the
longitude direction is positive east, and the latitude
coordinate system is planetocentric.
A string with one and only one set of question marks ("?").
This string will be used to create unique IDs for each control
point created by this program. The question marks will be replaced
with a number beginning with zero. For example the pattern
"User????" would create point IDs "User0001" through
"User9999". Note: Make sure there are enough "?"s for all the
control points that may be created during this run. If all question
marks are exausted the program will throw an error.
A string describing the purpose of this control network. For
example, a description might be "LROC NAC MareSmythii GRID NETWORK".
This description indicates that the control network is for the LROC
mission using the narrow angle camera instrument, and the feature of
interest is Mare Smythii. The description string can be literally
anything, but it is helpful to make it something that is descriptive
of the control network.
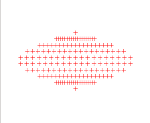
This example illustrates how to generate a control network for the
target planet Mars. The resulting control net is named 'out.net', and
has control points seeded from -90 to +90 latitude, 0 to 360 longitude
with a spacing of 20 degrees between each point.
This is the control network that is created by seedgrid.
Output Image
Resulting distribution of points in the network
Point Distribution Visualization
This image is a visualization of the point distribution within the
control network. This is projected using a sinusoidal projection.
Please note that this image is not an output of the seedgrid
application. It is included as a visual aid only.