|
Isis 3.0 Object Programmers' Reference |
Home |
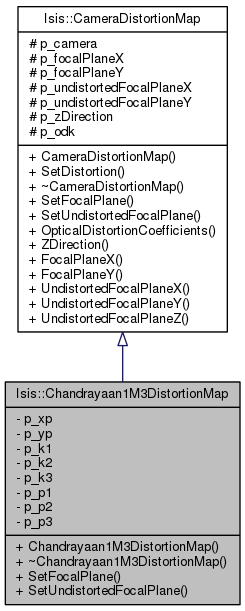
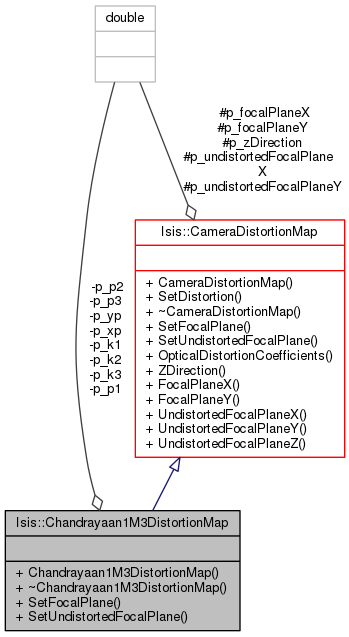
Distortion map for the Chandrayaan1 M3 camera. More...
#include <Chandrayaan1M3DistortionMap.h>
Public Member Functions | |
| Chandrayaan1M3DistortionMap (Camera *parent, double xp, double yp, double k1, double k2, double k3, double p1, double p2) | |
| bool | SetFocalPlane (const double dx, const double dy) |
| Compute undistorted focal plane x/y. | |
| bool | SetUndistortedFocalPlane (const double ux, const double uy) |
| Compute distorted focal plane x/y. | |
| void | SetDistortion (int naifIkCode) |
| Load distortion coefficients. | |
| std::vector< double > | OpticalDistortionCoefficients () const |
| Return optical distortion polynomial coefficients. | |
| double | ZDirection () const |
| Return the direction of the focal plane Z-axis. | |
| double | FocalPlaneX () const |
| Return distorted focal plane x. | |
| double | FocalPlaneY () const |
| Return distorted focal plane y. | |
| double | UndistortedFocalPlaneX () const |
| Return undistorted focal plane x. | |
| double | UndistortedFocalPlaneY () const |
| Return undistorted focal plane y. | |
| double | UndistortedFocalPlaneZ () const |
| Return undistorted focal plane z. | |
Protected Attributes | |
| Camera * | p_camera |
| double | p_focalPlaneX |
| double | p_focalPlaneY |
| double | p_undistortedFocalPlaneX |
| double | p_undistortedFocalPlaneY |
| double | p_zDirection |
| std::vector< double > | p_odk |
Private Attributes | |
| double | p_xp |
| double | p_yp |
| principal point coordinates | |
| double | p_k1 |
| double | p_k2 |
| double | p_k3 |
| coefficients of radial distortion | |
| double | p_p1 |
| double | p_p2 |
| double | p_p3 |
| coefficients of decentering distortion | |
Distortion map for the Chandrayaan1 M3 camera.
This class is used by the Chandrayaan1 M3 camera model as its distortion map. Equations provided by Randy Kirk and code provided by Ken Edmundson.
Definition at line 48 of file Chandrayaan1M3DistortionMap.h.
|
inlineinherited |
Return distorted focal plane x.
Definition at line 72 of file CameraDistortionMap.h.
Referenced by Isis::ControlPoint::ComputeResiduals(), Isis::PushFrameCameraGroundMap::FindDistance(), Isis::Camera::RawFocalPlanetoImage(), Isis::Camera::SetRightAscensionDeclination(), and Isis::LineScanCameraSkyMap::SetSky().
|
inlineinherited |
Return distorted focal plane y.
Definition at line 77 of file CameraDistortionMap.h.
Referenced by Isis::ControlPoint::ComputeResiduals(), Isis::PushFrameCameraGroundMap::FindDistance(), Isis::Camera::RawFocalPlanetoImage(), Isis::Camera::SetRightAscensionDeclination(), and Isis::LineScanCameraSkyMap::SetSky().
|
inherited |
Return optical distortion polynomial coefficients.
Definition at line 195 of file CameraDistortionMap.cpp.
|
inherited |
Load distortion coefficients.
This method loads the distortion coefficients from the instrument kernel. The coefficients in the NAIF instrument kernel are expected to be in the form of:
These coefficient will be used to convert from focal plane x,y to undistorted x,y as follows (add equation here)
| naifIkCode | Code to search for in instrument kernel |
Generalize to read variable number of coefficients
Add latex equation to the documentation
Definition at line 65 of file CameraDistortionMap.cpp.
References Isis::toString().
Referenced by Isis::AmicaCamera::AmicaCamera(), Isis::CTXCamera::CTXCamera(), Isis::HiriseCamera::HiriseCamera(), Isis::LroWideAngleCameraDistortionMap::LroWideAngleCameraDistortionMap(), Isis::LoHighDistortionMap::SetDistortion(), and Isis::LoMediumDistortionMap::SetDistortion().
|
virtual |
Compute undistorted focal plane x/y.
Compute undistorted focal plane x/y given a distorted focal plane x/y. after calling this method, you can obtain the undistorted x/y via the UndistortedFocalPlaneX and UndistortedFocalPlaneY methods
| dx | distorted focal plane x in millimeters |
| dy | distorted focal plane y in millimeters |
Reimplemented from Isis::CameraDistortionMap.
Definition at line 59 of file Chandrayaan1M3DistortionMap.cpp.
|
virtual |
Compute distorted focal plane x/y.
Compute distorted focal plane x/y given an undistorted focal plane x/y. After calling this method, you can obtain the distorted x/y via the FocalPlaneX and FocalPlaneY methods
| ux | undistorted focal plane x in millimeters |
| uy | undistorted focal plane y in millimeters |
Reimplemented from Isis::CameraDistortionMap.
Definition at line 101 of file Chandrayaan1M3DistortionMap.cpp.
|
inlineinherited |
Return undistorted focal plane x.
Definition at line 82 of file CameraDistortionMap.h.
Referenced by Isis::BundleAdjust::ApproximatePoint_ClosestApproach(), Isis::ControlPoint::ComputeApriori(), and Isis::Camera::SetImage().
|
inlineinherited |
Return undistorted focal plane y.
Definition at line 87 of file CameraDistortionMap.h.
Referenced by Isis::BundleAdjust::ApproximatePoint_ClosestApproach(), Isis::ControlPoint::ComputeApriori(), and Isis::Camera::SetImage().
|
inlineinherited |
Return undistorted focal plane z.
Definition at line 92 of file CameraDistortionMap.h.
References Isis::Camera::FocalLength().
Referenced by Isis::BundleAdjust::ApproximatePoint_ClosestApproach(), and Isis::Camera::SetImage().
|
inherited |
Return the direction of the focal plane Z-axis.
Definition at line 201 of file CameraDistortionMap.cpp.
|
private |
coefficients of radial distortion
Definition at line 60 of file Chandrayaan1M3DistortionMap.h.
Referenced by SetFocalPlane(), and SetUndistortedFocalPlane().
|
private |
coefficients of decentering distortion
Definition at line 61 of file Chandrayaan1M3DistortionMap.h.
|
private |
principal point coordinates
Definition at line 59 of file Chandrayaan1M3DistortionMap.h.
Referenced by SetFocalPlane(), and SetUndistortedFocalPlane().